Roboti a jejich využití – Robotika , definice
Roboty , pohony SMA pro roboty , servopohony , průmyslové roboty Robotika , vysvětlení definice . Rozdělení robotů , jak fungují …
Robot je univerzální automat pro provádění pohybů, přičemž pohyby se provádějí v určitých osách. Vyznačuje se tím, že je programovatelný, provádí velké množství činností, má senzory, chapadla a nástroje.
Průmyslový robot je automatický stroj, který představuje soubor výkonných mechanismů a programovatelného řídicího systému k provádění motorických funkcí ve výrobním procesu.
Obsah článku:
Blokové schéma průmyslového robota
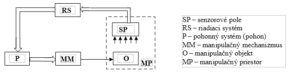
Senzorové pole (SP) – senzory informují o stavu agregátů robota a jeho pracovním prostředí. Používají se indukční, kapacitní, optické, ultrazvukové, odporové a další systémy.
Řídicí systém (RS ) – zajišťuje řízení jednotlivých pohonů, které vykonávají vlastní manipulační pohyb a také koordinaci s okolím, tj. technologickou scénou. Technologickou scénu tvoří pracovní stroje, dopravníkové pásy, polohovací zařízení nebo jiné roboty. Řídicí systém zahrnuje měřicí, řídicí, kontrolní, monitorovací a diagnostické subsystémy. Syntéza řídicích obvodů zajišťuje požadovanou kvalitu řízení pohonu ve statickém i dynamickém stavu.



Pohonný systém – pohon (P) – je jednotka, která se skládá z motoru, vedení, obvodů zajišťujících správnou funkci motoru, převodového mechanismu a samostatného pracovního orgánu. Pohon zajišťuje přesné ovládání v prostoru a přesnou rychlost a akceleraci.
Manipulační mechanismus (MM ) – mechanická konstrukce sestávající ze sady ramen. Ramena jsou nezávisle ovládaná a vykonávají posuvné a rotační pohyby. Manipulační mechanismus se skládá ze stojanu s rameny , ruky nebo zápěstí, konce ramene s uchopovačem nebo technologické hlavy.
Mastné vlasy : 5 domácích prostředků
Uchopovač – umožňuje bezpečné uchopení obrobku a jeho přenos maximální rychlostí z bodu A do bodu B.
Podle způsobu uchopení se chapadla dělí na:
(a) s pasivním úchopem:
– mechanické (pružné čelisti a opěrky)
– magnetické ( permanentní magnety)
– vakuum (deformační přísavky)
(b) s aktivním uchopováním:
– mechanické čelisti (s hydraulickým, pneumatickým, elektromagnetickým, elektromotorickým pohonem)
– magnetický (elektromagnet)
– podtlak nebo přetlak (ohebné prsty, vakuové komory).
Použití snímačů v motorových vozidlech na current
Základní rozdělení pohonů pro roboty
Pohony pro roboty se dělí na:
(a) elektrohydraulické pohony
(b) elektropneumatické pohony
(c) elektrické pohony
– bezkartáčové pohony
– aktuátory
Servopohony – představují nejvyšší úroveň řízení pohybového systému. Úkolem pohonu je uvést poháněný pracovní mechanismus předepsaným způsobem do pohybového stavu tak, aby pracovní mechanismus provedl požadovanou technologickou operaci nebo zajistil technologický proces v požadované kvalitě.
Servopohon se skládá z :
– řídicí systém
– elektrický měnič
– mechanický převodník
– napájení
– pracovní stroj
– motory
Servopohony mohou být vybaveny:
– asynchronní motory
– synchronní motory
– krokové motory
Pohony SMA pro roboty
Slitiny s tvarovou pamětí (SMA) mají schopnost „zapamatovat si“ určité, i složité tvary a střídavě je při zahřívání nebo ochlazování (na základě změny teploty) nabývat, a tím vykonávat mechanickou práci, ale vždy jen v jednom směru. Využívá se tzv. jednosměrný a obousměrný paměťový efekt intermetalických sloučenin, jako jsou NiTi (nikl-titan), CuZnAl (měď-zinek-hliník), CuAlNi (měď-hliník-nikl) a další. SMA se používá v robotických akčních členech, kde lze polohu určovat pomocí regulace teploty.
Pohyby lze ovládat elektrickým ohřevem. SMA se používá v oblasti mikrorobotů, mikromanipulátorů, chapadel, umělých prstů a dalších. Konstrukce pohonů SMA je velmi rozmanitá. Mezi základní typy patří: drát, tyč, pásek, pružina a obecný tvar. Použití vodiče SMA ve funkci pohonu je znázorněno na následujících obrázcích..
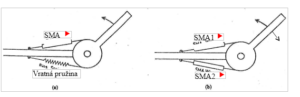
První pohon zobrazený na obr. (a) používá vratnou pružinu nebo jiný pružný materiál. Zahřátím drátu SMA se rameno uvede do pohybu a vratná pružina ho vrátí do původní polohy. Ve druhém případě, obr. b) existují dva vodiče SMA1 a SMA2, v závislosti na zahřívání SMA1 a SMA2 se rameno pohybuje doprava nebo doleva.
Z hlediska konstrukce aktuátoru SMA pro robota jsou rozhodující následující charakteristiky: velikost a opakovatelnost zpětné deformace (prodloužení), teplotní rozsah jevu SMA, velikost síly, přípustné zatížení, dosažitelný počet pracovních cyklů (nad 10 000), velikost časové odezvy a způsob chlazení.
Obecně lze říci, že aktuátory SMA mohou vyvinout velkou sílu na relativně malé dráze. Tvarová přizpůsobivost umožňuje navrhovat pohony na míru, které mají bez mechanických převodů vynikající poměr výkonu a hmotnosti. Jsou velmi spolehlivé a odolné vůči drsnému prostředí. Vynikají v oblasti do 100 g a mají jednoduchou konstrukci.